
 |
영국 링컨대학 자율 시스템 센터(L-CAS) 연구팀이 제시한 우주 건설 로봇의 콘셉트인 E-Walker. 링컨대학 연구팀 제공 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
2021년 우주로 날아가 이듬해부터 임무를 시작한 제임스 웹 우주 망원경(JWST)은 인류가 가진 가장 비싸고 강력한 망원경으로 인류의 지식을 크게 확장하고 있습니다. 예를 들어 120억 광년 떨어진 은하를 관측했다면 빛이 지구까지 온 시간만큼 과거를 거슬러 볼 수 있다는 의미입니다. 엄청난 성능을 가진 제임스 웹 우주 망원경 덕분에 과학자들은 가장 먼 우주의 과거로 거슬러 올라갈 수 있었습니다.
하지만 사람 욕심에는 끝이 없고 우주를 탐구하는 인간의 호기심에도 한계가 없기 때문에 과학자들은 이미 제임스 웹 우주 망원경의 뒤를 이을 차세대 망원경을 논의하고 있습니다. 차세대 망원경에서 가장 큰 걸림돌은 지름 6.5m의 주경(primary mirror·망원경에서 제일 먼저 빛을 모으는 거울)을 지닌 제임스 웹 우주 망원경보다 더 큰 망원경을 우주로 발사하는 일입니다.
제임스 웹 우주 망원경도 허블 우주 망원경보다 훨씬 큰 주경을 지닌 망원경을 우주로 발사하기 위해 여러 개의 육각형 거울을 접어서 쏘아 올리는 방식을 사용했습니다. 하지만 이 방법을 사용해도 지름 10m가 넘는 차세대 망원경을 우주에 보내는 일은 쉽지 않은 과제입니다. 무엇보다 더 많은 거울을 접었다 해도 우주에서 이를 펼치고 미세 조정하는 일도 쉽지 않습니다. 제임스 웹 우주 망원경도 발사 후 실제 임무에 투입하기까지 6개월 이상의 시간이 필요했습니다.
영국 링컨대학 자율 시스템 센터(L-CAS)의 마뉴 나이어와 동료들은 새로운 개념의 우주 조립 시스템을 대안으로 제시했습니다. 국제 유인 우주 정거장(ISS)처럼 작은 부품을 우주로 발사해 더 큰 망원경을 건설하자는 의견은 이전에도 있었지만, 수많은 부품을 우주에서 조립할 수단이 마땅치 않다는 게 문제였습니다. 따라서 연구팀은 자율 건설 로봇에 중점을 두고 연구를 진행했습니다.
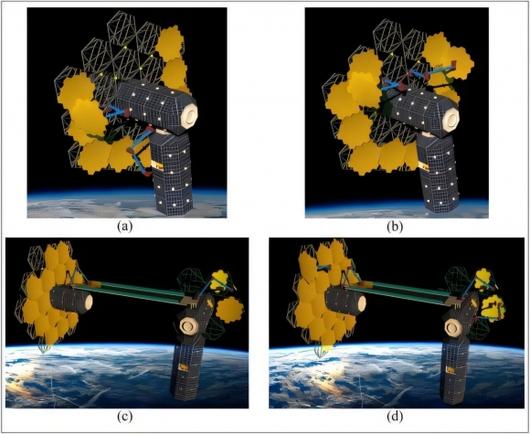 |
LAST의 조립 시뮬레이션. 링컨대학 연구팀 제공 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
연구팀이 제시한 우주 건설 로봇의 콘셉트인 E-Walker(End-Over-End Walking Robot)는 자유롭게 회전과 접힘이 가능한 7개 관절로 이뤄져 있으며 양 끝에 부품이나 혹은 로봇을 지지하기 위한 결합 시스템이 존재합니다. 이를 이용해 구조물 위를 이동하면서 부품들을 각 위치에 조립할 수 있습니다. 조종은 사람이 아니라 자율 시스템인 RAAS(Robotics, Automation and Autonomous Systems)를 통해 이뤄집니다.
연구팀은 E-Walker의 첫 목표로 주경 지름이 25m인 초대형 망원경 LAST(Large Aperture Space Telescope with a wide-field)의 시뮬레이션을 진행했습니다. 작은 육각형 거울 18개를 조립해 제임스 웹 우주 망원경처럼 큰 육각형 거울을 만들고 다시 이를 19개 연결해 초대형 거울을 지닌 우주 망원경을 만드는 것입니다.
물론 실제 로봇을 개발해서 우주에서 검증하기까지는 많은 과정이 남아 있습니다. 하지만 로켓으로 쏘아 올릴 수 있는 구조물 크기에는 한계가 있는 만큼 결국 미래 우주 탐사와 개척을 위해서는 수많은 부품을 우주에서 조립하는 기술이 필수적입니다. 아직은 기술적 가능성을 검증하는 단계이지만, 언젠가는 우주 조립 로봇이 활약하는 날이 올 것으로 기대합니다.
고든 정 과학 칼럼니스트 jjy0501@naver.com
▶ 재미있는 세상[나우뉴스]
▶ [페이스북]
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
