
[서울신문 나우뉴스]
초창기 걷는 로봇은 대개 4개의 다리를 지니고 있었습니다. 인간처럼 넘어지지 않고 두 다리로 걷는다는 것은 사실 쉬운 일이 아니기 때문입니다. 하지만 최근 로봇 기술의 발달로 인해 사람처럼 두 발로 걷는 로봇이 현실이 되고 있습니다. 두 발로 능숙하게 걷는 휴머노이드 로봇을 보면 로봇이 인간의 노동을 대체하는 미래가 이제 그렇게 멀게 느껴지지 않을 정도입니다.
아무튼 로봇이 안정적으로 걷거나 빠르게 움직이기 위해서는 동물처럼 2개나 4개처럼 짝수의 다리를 지닌 것이 합리적인 선택으로 보입니다. 하지만 일부 과학자들은 굳이 그럴 필요가 없다고 생각하고 있습니다. 세 개의 다리도 상황에 따라서는 합리적인 대안이 될 수 있습니다. 스위스 취리히 연방 공대(ETH Zurich)의 연구팀도 세 개의 다리를 지닌 삼족 로봇을 생각했습니다.
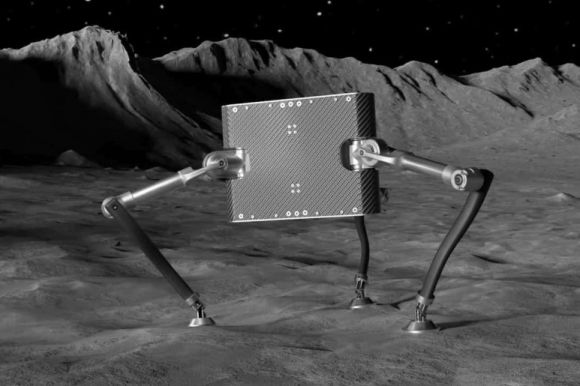 |
소행성에서 탐사하는 스페이스호퍼 로봇의 개념도 |
초창기 걷는 로봇은 대개 4개의 다리를 지니고 있었습니다. 인간처럼 넘어지지 않고 두 다리로 걷는다는 것은 사실 쉬운 일이 아니기 때문입니다. 하지만 최근 로봇 기술의 발달로 인해 사람처럼 두 발로 걷는 로봇이 현실이 되고 있습니다. 두 발로 능숙하게 걷는 휴머노이드 로봇을 보면 로봇이 인간의 노동을 대체하는 미래가 이제 그렇게 멀게 느껴지지 않을 정도입니다.
아무튼 로봇이 안정적으로 걷거나 빠르게 움직이기 위해서는 동물처럼 2개나 4개처럼 짝수의 다리를 지닌 것이 합리적인 선택으로 보입니다. 하지만 일부 과학자들은 굳이 그럴 필요가 없다고 생각하고 있습니다. 세 개의 다리도 상황에 따라서는 합리적인 대안이 될 수 있습니다. 스위스 취리히 연방 공대(ETH Zurich)의 연구팀도 세 개의 다리를 지닌 삼족 로봇을 생각했습니다.
2년 반부터 학생 프로젝트로 시작된 삼족 로봇인 스페이스호퍼(SpaceHopper) 마치 곤충처럼 가늘고 긴 세 개의 다리를 지니고 있습니다. 여기에도 몸통도 삼각형입니다. 이런 기이한 모습을 한 이유는 소행성처럼 중력이 극히 낮은 천체에서 이동하는 것을 고려했기 때문입니다.
 |
실제 개발 중인 스페이스호퍼(아래) 출처 ETH Zurich/Jorit Geurts) |
다리가 세 개인 경우 삼각대처럼 서 있을 때는 안정적이지만, 한 발을 떼는 순간 바로 넘어지기 쉽습니다. 그러나 중력이 거의 없다시피 한 소행성 표면에서는 바로 넘어질 걱정이 없습니다. 사실 그보다 더 큰 문제는 중력이 너무 낮아서 다리 숫자와 관계없이 제대로 걸을 수가 없다는 것입니다. 질량이 낮은 소행성의 경우 로봇이 다리로 지면을 밀면 바로 우주 공간으로 튀어 올라 우주 미아가 될 수 있는 위험성이 있습니다.
스페이스호퍼의 목적은 걷는 것이 아니라 이름처럼 통통 튀는 것입니다. 지면에 힘을 주고 살짝 뛰어오른 후 지면에 다시 착지할 때 세 개의 다리를 이용해 삼각대처럼 균형을 잡습니다. 한 번에 착지하지 못하고 몇 번을 통통 튈 수도 있는데, 이런 점을 감안해서 다리는 가늘어도 충격에 강하게 만들어졌습니다. 아래위가 똑같고 360도 세 방향으로 형태도 같기 때문에 어느 쪽으로 착지해도 임무 수행에는 지장이 없습니다.
 |
에어 제로 G 무중력/미세중력 환경에서 테스트 중인 스페이스호퍼 로봇. 출처 ETH Zurich) |
연구팀은 실험실에서 모의 미세 중력 환경을 만들어 스페이스호퍼 로봇을 테스트했습니다. 그리고 거의 중력이 없는 것과 같은 환경에서 테스트하기 위해 유럽 우주국과 프랑스의 노브스페이스와 협력해 에어 제로 G 무중력 비행기에 이 로봇을 태웠습니다. 에어 제로 G는 개조한 에어버스 A310 항공기로 반복적으로 높은 고도에서 30초 정도 자유낙하 해 탑승한 우주 비행사나 실험실에 무중력/미세중력 환경을 제공하는 항공기입니다.
고든 정 과학 칼럼니스트 jjy0501@naver.com
▶ 재미있는 세상[나우뉴스]
▶ [페이스북]