
[서울신문 나우뉴스]
최근 주요 강대국에서 달 탐사 로버 개발이 한창이다. 중국의 옥토끼 로버가 탐사에 성공한 후 미국과 유럽의 달 탐사 로버 개발이 활발해지고 있다. 특히 미국의 경우 아폴로 계획 이후 반세기 만에 인류를 다시 달로 보내기 위한 사전 조사 작업으로 여러 대의 달 탐사 로버 프로젝트를 가동 중이다. 미국 나사의 주요 파트너인 유럽 우주국(ESA) 역시 이에 호응해 독자 달 탐사 로버를 개발 중이다.
미국과 유럽의 달 탐사 로버의 첫 번째 목표는 달의 극지방에 있는 크레이터의 영구 음영 지대다. 영원히 햇빛이 닿지 않는 지역으로 얼음 상태의 물이 존재할 가능성이 매우 크기 때문이다.
 |
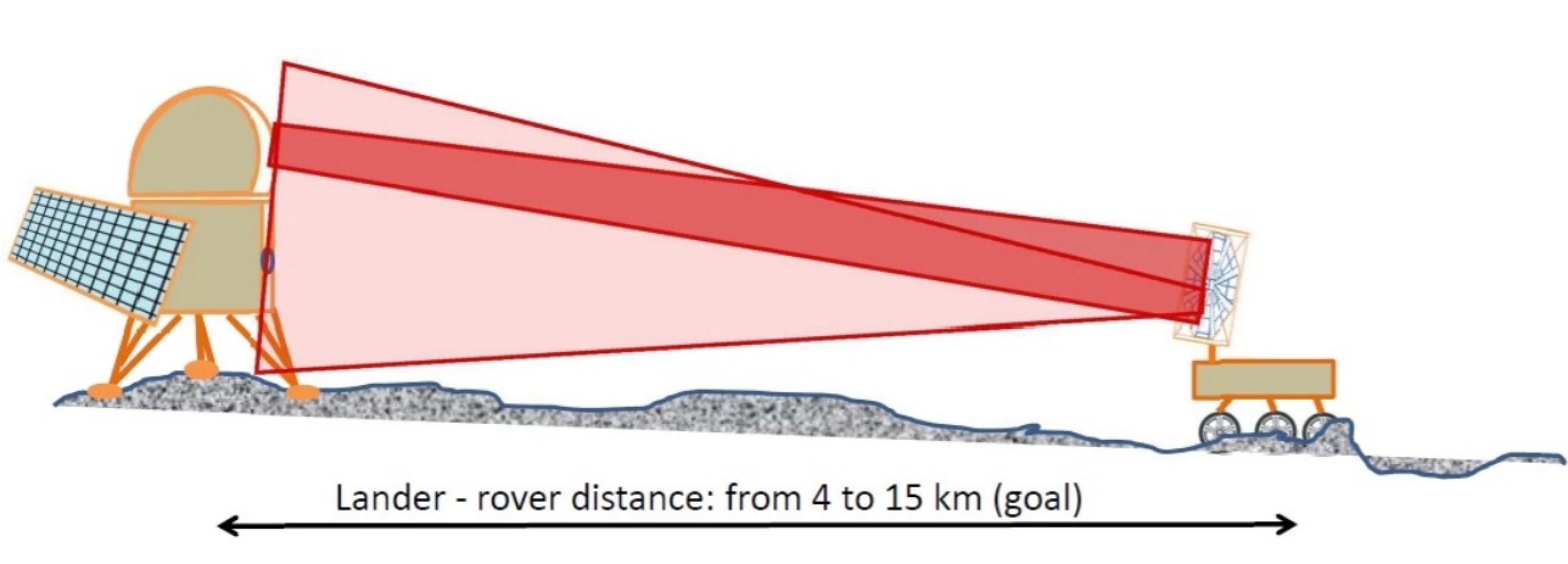
스페인에서 테스트 중인 로버와 레이저를 이용한 에너지 공급 시스템의 개념도. 출처: Fernando Gand |
 |
스페인에서 테스트 중인 로버와 레이저를 이용한 에너지 공급 시스템의 개념도. 출처: Fernando Gand |
최근 주요 강대국에서 달 탐사 로버 개발이 한창이다. 중국의 옥토끼 로버가 탐사에 성공한 후 미국과 유럽의 달 탐사 로버 개발이 활발해지고 있다. 특히 미국의 경우 아폴로 계획 이후 반세기 만에 인류를 다시 달로 보내기 위한 사전 조사 작업으로 여러 대의 달 탐사 로버 프로젝트를 가동 중이다. 미국 나사의 주요 파트너인 유럽 우주국(ESA) 역시 이에 호응해 독자 달 탐사 로버를 개발 중이다.
미국과 유럽의 달 탐사 로버의 첫 번째 목표는 달의 극지방에 있는 크레이터의 영구 음영 지대다. 영원히 햇빛이 닿지 않는 지역으로 얼음 상태의 물이 존재할 가능성이 매우 크기 때문이다.
달 탐사 로버의 임무는 정확한 물의 양과 분포를 확인해 쉽게 채취가 가능한지 알아내는 것이다. 여기서 물을 쉽게 얻을 수 있다면 앞으로 우주 개발에 귀중한 자원이 될 것이다. 하지만 영원히 햇빛이 도달하지 않아서 태양전지에서 에너지를 얻는 소형 로버로는 탐사가 어렵다는 문제점이 있다.
지금까지 태양 에너지를 사용할 수 없는 우주선이나 탐사선의 경우 유일한 해결책은 원자력 전지로 알려진 RTG(radioisotope thermoelectric generator)를 사용하는 것이었다.
하지만 RTG는 부피가 크고 가격이 비싸 소형 로버에 탑재하기는 부담스럽다. 방사능 누출 사고에 대한 부담도 존재한다. 유럽 우주국이 내놓은 대안은 레이저를 이용해 에너지를 공급하는 것이다.
유럽 우주국이 개발 중인 필립 (PHILIP, Powering rovers by High Intensity Laser Induction on Planets) 로버는 기지 역할을 하는 착륙선과 탐사 로버 두 가지로 구성되어 있다. 기지는 햇빛이 닿는 크레이터 가장자리에 착륙한 후 여기서 태양 전지를 펼쳐 에너지를 생산한다.
그리고 기지에서 출발한 필립 로버는 레이저를 전기 에너지로 바꾸는 시스템을 탑재해 햇빛이 도달하지 않는 위치에서도 탐사가 가능하다. 500W 출력의 레이저는 4-15km 거리까지 에너지를 전송할 수 있다.
현재 유럽 우주국은 스페인에서 필립 로버의 프로토타입을 테스트 중이다. 가장 가능성 큰 탐사 목표는 달 남극에 있는 새클턴 크레이터 (Shackleton crater)로 대략 10도 정도의 완만한 경사를 타고 내려가면서 레이저로 에너지를 전송받는 시나리오를 검증하고 있다. 만약 성공한다면 필립 로버는 오랜 시간 크레이터 내부를 자세히 조사할 수 있다
2020년대에 들어 달 탐사는 아폴로 계획이 추진됐던 1960년대처럼 새로운 붐을 일으키고 있다. 하지만 이번에 다른 점은 한 번 가고 나서 그만두는 것이 아니라 영구적인 기지를 건설해 인류의 우주 개척을 본격화한다는 점이다.
미국과 유럽이 달에 로버를 보내 물의 분포와 양을 조사하는 것은 이를 위한 사전 준비라고 할 수 있다. 과연 어떤 결과가 나올지 주목된다.
고든 정 칼럼니스트 jjy0501@naver.com
▶ 재미있는 세상[나우뉴스]
▶ [페이스북]