
신경·근골격 디지털휴먼트윈+물리 기반 디바이스트윈 연동
설계 단계서 성능·사용성 동시 검증
대규모 피험자·반복 착용실험 의존 줄여
웨어러블 로봇 개발기간·비용절감·상용화 속도 기대
설계 단계서 성능·사용성 동시 검증
대규모 피험자·반복 착용실험 의존 줄여
웨어러블 로봇 개발기간·비용절감·상용화 속도 기대
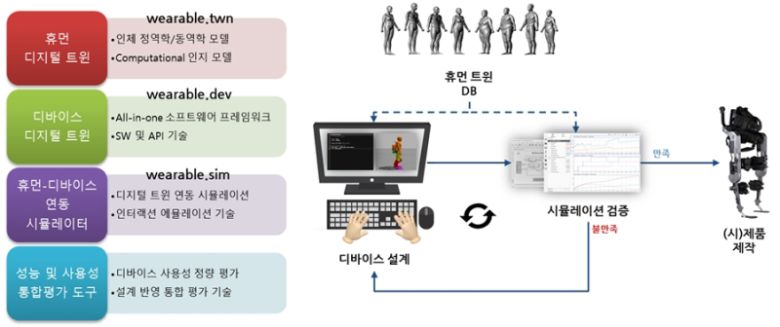 |
웨어러블 로봇 검증평가 기술 개념도. ETRI |
웨어러블 로봇을 만들 때마다 사람에게 직접 입혀가며 성능과 착용감을 반복 확인하던 방식이 바뀔 전망이다.
한국전자통신연구원(ETRI)이 사용자가 실제 착용하지 않아도 웨어러블 로봇의 성능·사용성(UX)을 설계 단계에서 미리 검증할 수 있는 ‘디지털 휴먼-디바이스 트윈 기반 통합평가 소프트웨어’를 개발했다.
기존 개발은 시제품을 만든 뒤 사람에게 착용시켜 시험하고, 문제가 나오면 다시 설계·제작·실험을 반복하는 구조로, 시간과 비용은 물론 임상시험 부담도 컸다.
ETRI는 이 과정을 가상 환경에서 시뮬레이션으로 걸러내는 방식을 적용했다.
이는 사람을 대신하는 디지털 휴먼 트윈과 실제 기기를 대신하는 디바이스 트윈을 결합, 웨어러블 로봇의 설계·제어 알고리즘·센서 특성까지 소프트웨어로 정밀 검증할 수 있다.
이를 통해 신경과 근골격 보조가 필요한 사용자를 가상 환경에서 정밀하게 구현해 로봇을 입어보기 전 설계 단계에서 성능과 사용자 경험을 미리 확인할 수 있다.
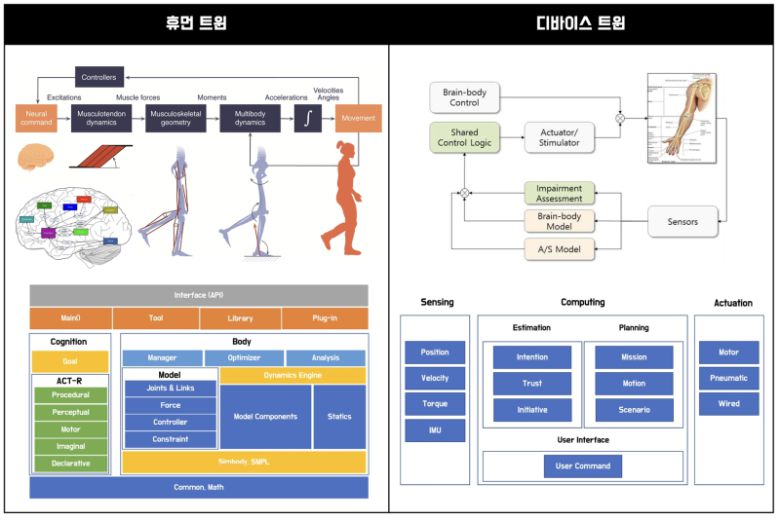
ETRI는 이번 연구에서 사용자의 신체적·인지적 특성을 모델링해 개인별 맞춤형 가상 인간을 만드는 ‘신경·근골격 디지털 휴먼 트윈 생성 기술’을 개발했다.
아울러 로봇의 움직임과 제어 알고리즘, 센서 특성 등을 반영한 ‘물리 기반 디바이스 트윈 생성 기술’을 구축했다.
또 가상 환경에서 디지털 휴먼과 로봇 간 상호작용을 정밀하게 재현해 착용감과 사용성을 평가하는 ‘연동 시뮬레이션 기술’과 시뮬레이션 결과를 수치화해 설계에 즉시 반영하는 ‘통합평가 시스템’을 확보했다.
 |
이번 기술은 부산대병원 글로컬임상실증센터와 공동 실험으로 유효성을 증명했다.
실제 환자가 로봇을 입고 수행한 임상 평가 결과와 디지털트윈 시뮬레이션 결과를 비교한 결과, 상관계수 0.6 이상을 기록해 신뢰성을 입증했다.
ETRI는 이 기술을 로봇 제조기업 등에 이전하고 후속 연구를 통해 상용화를 추진할 계획이다.
김우진 ETRI AI로봇UX연구실 책임연구원은 “디지털트윈 기술을 활용하면 가상으로 다양한 사용자 특성을 조합해 검증할 수 있어 최소한의 임상시험만으로 최적의 로봇 사양을 도출할 수 있다”고 설명했다.
윤대섭 ETRI AI로봇UX연구실장은 “이번에 확보한 원천 기술을 재활 로봇이나 보행 보조기기, 산업용 웨어러블 로봇 등 사용자 경험이 중요한 로봇 분야로 확대 적용할 것”이라고 밝혔다.
 |
웨어러블 디바이스 성능평가 기술을 개발한 부산대학교병원-ETRI 공동연구진(왼쪽부터 부산대병원 장민우 연구원, 박종환 부교수, ETRI 김우진 기술총괄, ETRI 조현우 책임연구원. ETRI |