
" 엔비디아 vs 테슬라 옵티머스: 로봇 두뇌와 신체의 전쟁 - ① " 에서 이어집니다...
(MHN 이종헌 기자) 엔비디아와 테슬라는 로봇을 '똑똑하게' 만드는 방식부터 근본적으로 다르다.
엔비디아는 합성 데이터와 시뮬레이션을 적극적으로 활용한다. 예를 들어, 'GR00T-Dreams'라는 도구를 통해 단 몇 시간 만에 수십만 개의 동작 데이터를 가상 환경에서 만들어낸다.
 |
(MHN 이종헌 기자) 엔비디아와 테슬라는 로봇을 '똑똑하게' 만드는 방식부터 근본적으로 다르다.
엔비디아는 합성 데이터와 시뮬레이션을 적극적으로 활용한다. 예를 들어, 'GR00T-Dreams'라는 도구를 통해 단 몇 시간 만에 수십만 개의 동작 데이터를 가상 환경에서 만들어낸다.
예를 들어, 로봇이 컵을 집는 동작을 배우려면, 실제로 수천 번 실험하지 않아도 된다.
GR00T-Dreams가 만들어낸 가상 데이터를 바탕으로, AI가 시뮬레이션에서 다양한 동작을 수없이 반복 연습하고, 그 결과를 실제 로봇에 바로 적용한다.
이 과정은 마치 로봇이 '디지털 트윈' 세상에서 여러 번 인생을 살아본 뒤, 현실에 등장하는 것과 비슷하다.
이 데이터를 바탕으로 AI가 다양한 동작을 반복적으로 시뮬레이션에서 학습하고, 실제 로봇에 적용한다.
최근에는 GR00T N1, N1.5 같은 오픈소스 파운데이션 모델을 공개해, 로봇이 새로운 환경이나 작업을 훨씬 빠르게 습득할 수 있도록 지원하고 있다.
이처럼 엔비디아의 접근법은 실제 환경에서 일일이 데이터를 모으는 대신, 디지털 트윈과 합성 데이터를 활용해 개발 기간을 획기적으로 단축하고, 다양한 로봇에 범용적으로 적용할 수 있는 AI를 만드는 데 초점을 맞춘다.
Boston Dynamics, Agility Robotics 등 글로벌 로봇 기업들도 이 생태계에 합류해, 개발자들은 실제 로봇을 만들기 전 'Isaac Lab'과 'Cosmos' 같은 오픈소스 시뮬레이션 플랫폼에서 자유롭게 실험하고, 실패해도 부담 없이 AI를 진화시킬 수 있다.
 |
반면, 테슬라 옵티머스는 실제 인간의 행동 데이터를 대규모로 수집해 학습하는 방식을 택한다. 테슬라는 수십 명의 연구원이 모션캡처 슈트를 입고, 실제로 물건을 들고, 청소하고, 걷고, 다양한 작업을 반복한다.
이렇게 수집한 인간 행동 데이터를 옵티머스 AI에 입력해, 로봇이 사람처럼 자연스럽게 움직이고, 실제 환경에서 바로 쓸 수 있는 실용성을 키운다.
여기에 1인칭-3인칭 시점의 인터넷 영상까지 활용해, 로봇이 사람의 시각과 동작을 더 폭넓게 배울 수 있도록 한다.
최근 공개된 옵티머스는 22자유도의 손을 갖추고, 물건을 집거나 옮기는 등 정교한 작업을 수행한다. 자가충전 도킹 스테이션, 경사로 걷기, 비전 센서 없이 지형을 판단하는 기술, 복잡한 환경에서의 균형 유지 등도 빠르게 발전하고 있다.
테슬라의 방식은 '진짜 인간 행동'과 '현실 환경'에서 얻은 데이터를 중시해, 로봇이 실제 공장이나 가정에서 바로 일할 수 있도록 만드는 데 초점을 맞춘다.
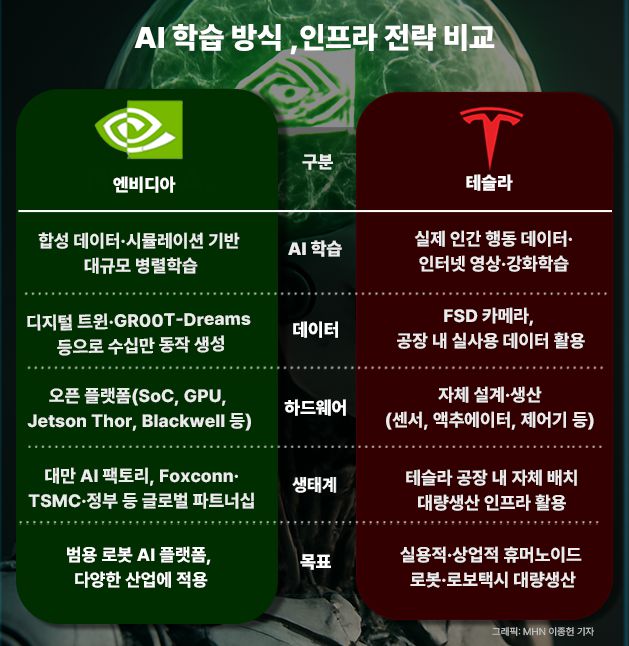 |
즉, 엔비디아가 "가상에서 대량의 데이터를 만들어 범용 AI를 빠르게 키우는 방식"이라면, 테슬라는 "현실 세계에서 직접 보고 배우는 방식"으로 로봇의 실용성과 완성도를 높이고 있는 셈이다.
이처럼 두 기업은 데이터 수집과 학습 방식, 그리고 개발 생태계 구축에서 뚜렷한 차이를 보이며, 각각의 강점과 한계를 바탕으로 로봇 혁신을 이끌고 있다.
하지만, 이 모든 기술이 실제 현실에서는 어떻게 쓰이고 있을까?
공장 한복판, 병원, 호텔, 그리고 우리가 매일 지나는 쇼핑몰까지 로봇이 이미 '사람 대신' 일하고 있다는 사실, 믿어지는가?
다음 기사에서는 "언젠가"가 아니라 "지금, 바로 여기"에서 벌어지는 로봇 혁명의 현장을 파헤친다.
과연, 우리의 일상은 어디까지 바뀌었을까?
"엔비디아 vs 테슬라 옵티머스, "공장부터 일상까지" 로봇 상용화의 현장 - ③" 에서 이어집니다.
사진= 엔비디아, X, Tesla Optimus, MHN
<저작권자 Copyright ⓒ MHN / 엠에이치앤 무단전재 및 재배포 금지>
![]() 이 기사의 카테고리는 언론사의 분류를 따릅니다.
이 기사의 카테고리는 언론사의 분류를 따릅니다.