
미국 노스캐롤라이나주립대 연구진
“트롤리 딜레마는 비현실적인 상황”
자율차 도덕적 판단위한 실험 개발해
지각하는 아이 학교 데려다주기 가정
제한속도·신호위반이나 추월 여부 등
현실적인 내용 기반해 시나리오 설계
“트롤리 딜레마는 비현실적인 상황”
자율차 도덕적 판단위한 실험 개발해
지각하는 아이 학교 데려다주기 가정
제한속도·신호위반이나 추월 여부 등
현실적인 내용 기반해 시나리오 설계
![생성형 인공지능(AI) ‘미드저니’를 이용해 만든 ‘자율주행차 사고’ 이미지. 미드저니는 문장을 이미지로 만들어주는 AI다. 해당 이미지는 자율주행차, 교통사고 등을 키워드로 삼아 사실주의 화풍으로 생성했다. [사진 출처=미드저니]](https://thumb.zumst.com/780x0/https://static.news.zumst.com/images/18/2023/12/05/e6e8658bf4d84318831c2b806b4c4250.png) |
생성형 인공지능(AI) ‘미드저니’를 이용해 만든 ‘자율주행차 사고’ 이미지. 미드저니는 문장을 이미지로 만들어주는 AI다. 해당 이미지는 자율주행차, 교통사고 등을 키워드로 삼아 사실주의 화풍으로 생성했다. [사진 출처=미드저니] |
언젠가는 도로를 누비게 될 자율주행차. 기술적인 문제도 그렇지만 아직 해결하지 못한 과제가 남아있는데 바로 ‘트롤리 딜레마’다. 트롤리 딜레마는 아래와 같은 상황에서 발생한다. 자율주행차를 타고 가고 있는데 브레이크가 고장 났다. 앞에 많은 사람이 건널목을 건너고 있었는데 이들을 치지 않으려면 핸들을 옆으로 돌려야 한다. 그렇게 되면 자율주행차에 앉아 있는 ‘내’가 다칠 수 있다. 이럴 때 자율주행차는 어떻게 움직이도록 프로그래밍 되어야 할까.
과거 연구에 따르면 이러한 상황이 발생했을 때 많은 사람은 비록 내가 다치더라도 길을 가던 행인을 다치지 않도록 설계해야 한다고 답했다. 하지만 이러한 차를 사겠냐는 질문에는 대부분이 “사지 않겠다”라고 했다. 이를 트롤리 딜레마라고 한다. 트롤리 딜레마는 정답이 없는 만큼 여러 논의와 연구가 필요하다.
![대표적인 윤리학 사고실험 트롤리 딜레마(광차 문제). [사진 출처=McGeddon]](https://thumb.zumst.com/780x0/https://static.news.zumst.com/images/18/2023/12/05/0a2026b360ef4565abbd85cd41c0883c.png) |
대표적인 윤리학 사고실험 트롤리 딜레마(광차 문제). [사진 출처=McGeddon] |
![가상현실에서 이뤄진 실험 장면 [사진=노스캐롤라이나주립대]](https://thumb.zumst.com/780x0/https://static.news.zumst.com/images/18/2023/12/05/d5685438aeb647f5bc96c1dd0ef00a02.png) |
가상현실에서 이뤄진 실험 장면 [사진=노스캐롤라이나주립대] |
미국 노스캐롤라이나주립대 연구진은 이러한 트롤리 딜레마와 관련, 자율주행차의 선택과 관련한 새로운 실험을 개발했다. 연구진에 따르면 이 실험은 트롤리 딜레마보다 현실의 교통 상황을 더욱 잘 반영했다고 한다. 연구진은 “트롤리 딜레마는 여러 사람의 죽음을 피하기 위해 의도적으로 한 사람을 죽일지를 결정하는 상황을 제시한다”라며 “다만 이러한 트롤리 딜레마는 비현실적”이라고 말했다. 이어 “운전자는 매일 제한 속도를 초과할지, 구급차를 앞지를 지와 관련된 현실적인 결정을 내려야 한다”라고 설명했다. 일상적으로 운전하면서 발생할 수 있는 ‘결정’이 사고로 이어질 수 있는 만큼 이러한 상황에 대한 도덕적 판단해야 한다는 것이다.
논문의 교신 저자인 벨즈코 두블예비치 노스캐롤라이나주립대 교수는 “예를 들어 누군가 제한 속도를 초과해 운전하며 신호를 위반했을 때 사고가 날 수 있는데, 운전자가 일상적인 상황에서 내리는 결정에 대해 우리가 어떤 도덕적 판단을 내리는지에 대한 문헌 데이터는 찾을 수 없다”라고 말했다.
연구진은 이러한 문제에 대한 답을 찾기 위한 실험을 개발했다. 자녀를 정시에 학교에 데려가기 위해 교통 신호를 위반할지를 결정해야 하는 부모와 같은 7가지 운전 시나리오를 만든 것이다. 각 시나리오는 가상 현실 환경에 프로그래밍 됐으며 부모의 행동을 상세히 볼 수 있도록 했다. 연구진은 이러한 상황을 기반으로 ‘행위자 행위 결과 모델(ADC, Agent Deed Consequence, ADC)’을 구축했다. ADC란 사람들이 직관적인 도덕적 판단을 내릴 때의 상황을 이해하기 위한 실험 모델이다. ADC는 사람들이 도덕적인 판단을 내릴 때 세 가지를 고려한다고 가정한다. 어떤 행위를 일으키는 사람의 성격과 그가 한 행위, 그리고 그에 따른 결과다.
A는 행위자, D는 행동, C는 결과인데 연구진은 행위자의 성격에 따라 A+(착한 사람), A-(악덕한 사람)으로 나누고, 교통 규칙을 따를 때를 D+, 그렇지 않을 때를 D-, 이에 따라 충돌이 발생하지 않으면 C+, 충돌이 발생하면 C-로 상황을 나눴다.
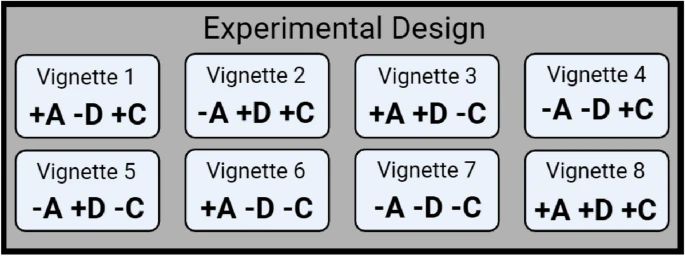 |
연구진의 ADC 실험 시나리오 |
이후 연구진은 부모의 행동과 결과를 다양하게 바꿔가며 각각의 교통 시나리오를 8개로 세분화했다. 예를 들어 한 버전의 시나리오에서는 아이를 아끼는 부모가 학교에 데려다주는 과정에서 신호등이 노란 불로 바뀌면 차를 멈춘다. 다른 버전은 부모가 학대하는데 신호등이 빨간불이 켜지고, 멈추지 못해 사고를 일으킨다. 다른 6가지 역시 부모의 행동에 따라 서로 다른 결과를 맞이한다.
이후 연구진은 실험에 참여한 사람들에 각 시나리오를 보고 운전자의 행동이 얼마나 도덕적이었는지를 1부터 10까지 척도로 점수를 매기도록 했다. 지난 1년간 125명의 시험자는 머리에 장착하는 헤드셋 디스플레이를 쓰고 이러한 실험을 진행했다. 연구진은 해당 결과를 논문에 공개하지 않았는데, 필요한 연구자에게 제공한다는 방침이다.
세치니 교수는 “이 실험은 우리가 자동차를 운전하는 상황에서 무엇을 도덕적 행동이라고 생각하는지에 대한 데이터를 제공할 것”이라며 “이후 자율주행차의 도덕적 의사 결정을 위한 AI 알고리즘 개발에 활용될 수 있다”라고 말했다.
연구진은 논문에서 “가상현실 공간에서 실험하고 일상적으로 발생할 수 있는 교통 장면에 초점을 맞춰 연구의 전반적 사실성과 신뢰성을 높였다”라고 평가했다. 해당 논문은 저널 ‘AI&사회, 지식 문화 커뮤니케이션’에 게재됐다.
[ⓒ 매일경제 & mk.co.kr, 무단 전재, 재배포 및 AI학습 이용 금지]