
한국연구재단은 서울대 선정윤·김호영 교수 연구팀이 전기적으로 물체를 감지해 접촉하지 않고도 잡아당길 수 있는 '거미줄' 로봇을 개발했다고 16일 밝혔다.
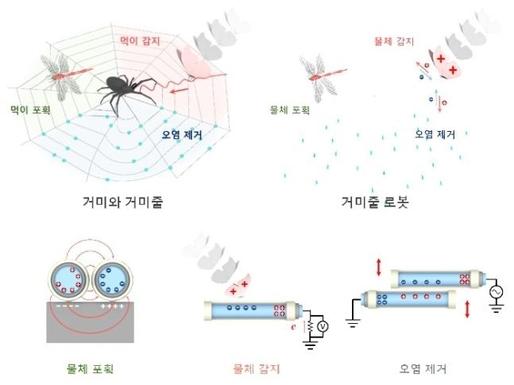 |
전기적으로 주변의 물체를 감지해 포획하고 오염물을 스스로 털어내는 '거미줄 로봇'이 개발됐다. /한국연구재단 제공 |
방사형 거미줄을 닮은 팔각형 모양의 로봇은 샤프심 두께의 신축성 있는 전도성 섬유를 배열해 만들었다. 수 ㎝ 거리까지 강력한 전기장을 만들어 주변의 물체를 자극한 뒤 물체로부터 나오는 전기장을 감지해 강한 정전기적 인력으로 달라붙게 만든다.
거미가 거미줄에 먹이가 걸리면 그 진동을 감지해 포획하는 것과 비슷한 원리이다. 금속과 세라믹 등 전도성 물질뿐만 아니라 유리, 나뭇잎 등 전기가 통하지 않는 물질들도 포획할 수 있다.
거미줄 로봇은 젤이나 탄성체 등 신축성 있는 소재로 돼 있어 원래 길이의 3배까지 늘어날 수 있으며, 자체 무게(0.2g)의 68배에 달하는 무거운 물체도 잡을 수 있다.
거미가 거미줄에 맺힌 이슬을 '새총'(slingshot)을 쏘듯 잡아당겼다가 놓는 방식으로 튕겨내는 것처럼 거미줄 로봇 역시 관성력을 이용해 오염물을 스스로 털어낼 수 있다.
선정윤 교수는 "반도체 미세 공정, 비접촉식 센싱 기술 등에 활용할 수 있을 것"이라고 말했다.
황민규 기자(durchman@chosunbiz.com)
<저작권자 ⓒ ChosunBiz.com, 무단전재 및 재배포 금지>
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
