
◇바퀴·다리 번갈아 쓰는 탐사 로봇
최근 우주 탐사 장비 개발은 지구와 다른 지형을 효율적으로 탐사하는 데 맞춰져 있다. 탐사 로봇은 주로 바퀴가 달린 형태여서 작은 장애물에 걸려도 넘어지거나 멈춰 서는 경우가 많았다. 탐사 로봇이 활동하는 무대는 사람이 없는 환경이기 때문에 한번 고장이 나면 수리하기도 어렵다. 이 때문에 어떤 지형에서도 효율적으로 탐사 활동을 벌일 수 있는 로봇 개발이 중요해졌다.
 |
<이미지를 클릭하시면 크게 보실 수 있습니다> |
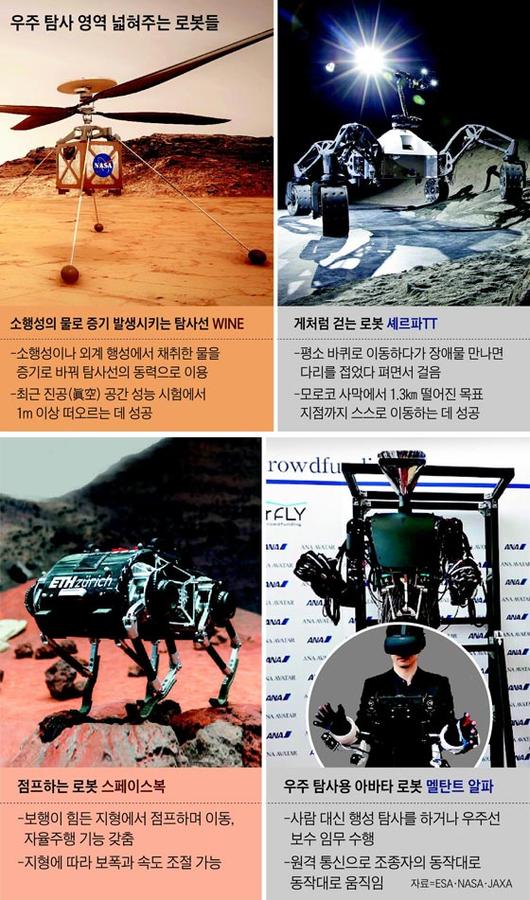
독일항공우주센터(DLR) 연구팀은 지난해 바퀴와 다리를 조합한 탐사 로봇 '셰르파 TT'를 개발했다. 이 로봇은 평소 네 개의 다리 끝에 달린 바퀴로 이동한다. 이동 중 돌부리와 같은 장애물을 만나면 바퀴를 멈춘 뒤 2.4m 길이의 다리를 접었다가 앞으로 뻗으며 이동한다. 바퀴만 달린 기존 탐사 장비로는 지나기 어려운 바위나 도랑도 쉽게 통과할 수 있다. 라이다(Lidar·레이저 거리 측정 센서)와 카메라를 탑재해 자율주행도 가능하다. 지난달 화성(火星) 환경과 비슷한 모로코 사막에서 성능 테스트를 한 결과 1.3㎞ 떨어진 목표 지점을 스스로 찾아가는 데 성공했다.
유럽우주항공국(ESA)은 지난해 11월 스위스 취리히 공대와 함께 공중으로 뛰어오를 수 있는 로봇 '스페이스복'을 개발했다. 이 로봇은 화성이나 달처럼 암석이 많고 운석 충돌구 때문에 바닥이 고르지 않은 지형에서 사슴처럼 폴짝 뛰며 이동할 수 있다. 지형에 따라 뛰는 높이와 이동 속도를 조절한다.
지상 로봇보다 넓은 시야를 갖고 탐사 활동을 할 수 있는 무인기 개발도 활발하다. NASA는 오는 2020년 화성 배치를 목표로 탐사용 드론을 개발하고 있다. 드론은 카메라가 달린 정육면체 형태 본체 위에 프로펠러 날개가 2개 달린 형태이다. 각 날개는 서로 다른 방향으로 돌기 때문에 안정적으로 비행을 할 수 있다.
◇지상에서 우주의 아바타 로봇 조종
최근에는 사람의 분신이 돼 우주를 누빌 수 있는 휴머노이드 개발도 활발하다. 일본항공우주국(JAXA)은 일본 항공기업 ANA와 공동으로 지구에서 원격 조종할 수 있는 사람 형태의 아바타 로봇 '멜탄트 알파'를 개발하고 있다. 지상의 과학자가 웨어러블(wearable ·장착형) 장비를 입고 특정 동작을 하면 멀리 떨어진 로봇이 그대로 움직이는 방식이다. 일본은 내년 초 국제우주정거장(ISS)에서 로봇 성능을 확인한 뒤 장차 달과 화성에도 보낼 계획이다.
유럽도 화성 궤도의 우주선에서 화성 기지에 보낼 휴머노이드 '저스틴'을 원격 조종하는 실험에 성공했다. 화성 우주선 대신 국제우주정거장에서 지구의 로봇을 조종했다. 러시아는 오는 8월 휴머노이드 '페도르'를 우주정거장에 보낼 계획이다. 다친 우주비행사를 치료하거나 각종 과학실험, 우주선 보수 유지 업무를 맡는다. NASA도 우주정거장에서 휴머노이드 '로보넛'을 실험했다.
이상률 한국항공우주연구원 부원장은 "휴머노이드 로봇은 방사능 수치가 높거나 고온의 환경에서도 탐사 활동을 할 수 있어 우주 탐사에 적합하다"고 말했다.
최인준 기자(pen@chosun.com)
<저작권자 ⓒ ChosunBiz.com, 무단전재 및 재배포 금지>
이 기사의 카테고리는 언론사의 분류를 따릅니다.
기사가 속한 카테고리는 언론사가 분류합니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
언론사는 한 기사를 두 개 이상의 카테고리로 분류할 수 있습니다.
